

ਦਾ ਸਿਧਾਂਤਪੇਚ ਸਟੈਪਰ ਮੋਟਰ: ਇੱਕ ਪੇਚ ਅਤੇ ਗਿਰੀ ਨੂੰ ਜੋੜਨ ਲਈ ਵਰਤਿਆ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਪੇਚ ਅਤੇ ਗਿਰੀ ਨੂੰ ਇੱਕ ਦੂਜੇ ਦੇ ਸਾਪੇਖਿਕ ਘੁੰਮਣ ਤੋਂ ਰੋਕਣ ਲਈ ਇੱਕ ਸਥਿਰ ਗਿਰੀ ਲਈ ਜਾਂਦੀ ਹੈ, ਇਸ ਤਰ੍ਹਾਂ ਪੇਚ ਨੂੰ ਧੁਰੀ ਤੌਰ 'ਤੇ ਹਿਲਾਉਣ ਦੀ ਆਗਿਆ ਮਿਲਦੀ ਹੈ। ਆਮ ਤੌਰ 'ਤੇ, ਇਸ ਪਰਿਵਰਤਨ ਨੂੰ ਮਹਿਸੂਸ ਕਰਨ ਦੇ ਦੋ ਤਰੀਕੇ ਹਨ।
ਪਹਿਲਾ ਕੰਮ ਮੋਟਰ ਵਿੱਚ ਅੰਦਰੂਨੀ ਧਾਗੇ ਨਾਲ ਇੱਕ ਰੋਟਰ ਬਣਾਉਣਾ ਹੈ, ਅਤੇ ਇਹ ਅਹਿਸਾਸ ਕਰਨਾ ਹੈਰੇਖਿਕ ਗਤੀਰੋਟਰ ਅਤੇ ਪੇਚ ਦੇ ਅੰਦਰੂਨੀ ਧਾਗਿਆਂ ਨੂੰ ਜੋੜ ਕੇ, ਜਿਸਨੂੰ ਪੈਨੇਟ੍ਰੇਟਿੰਗ ਪੇਚ ਸਟੈਪਿੰਗ ਮੋਟਰ ਕਿਹਾ ਜਾਂਦਾ ਹੈ। (ਨਟ ਮੋਟਰ ਰੋਟਰ ਨਾਲ ਜੁੜਿਆ ਹੋਇਆ ਹੈ ਅਤੇ ਪੇਚ ਸ਼ਾਫਟ ਮੋਟਰ ਰੋਟਰ ਦੇ ਕੇਂਦਰ ਵਿੱਚੋਂ ਲੰਘਦਾ ਹੈ। ਵਰਤੋਂ ਵਿੱਚ ਹੋਣ 'ਤੇ, ਪੇਚ ਨੂੰ ਠੀਕ ਕਰੋ ਅਤੇ ਰੋਟੇਸ਼ਨ-ਰੋਟੇਸ਼ਨ ਕਰੋ, ਜਦੋਂ ਮੋਟਰ ਚਾਲੂ ਹੋ ਜਾਂਦੀ ਹੈ ਅਤੇ ਰੋਟਰ ਘੁੰਮਦਾ ਹੈ, ਤਾਂ ਮੋਟਰ ਪੇਚ ਦੇ ਨਾਲ-ਨਾਲ ਰੇਖਿਕ ਤੌਰ 'ਤੇ ਚਲਦੀ ਰਹੇਗੀ। (ਇਸਦੇ ਉਲਟ, ਜੇਕਰ ਮੋਟਰ ਨੂੰ ਸਥਿਰ ਕੀਤਾ ਜਾਂਦਾ ਹੈ ਜਦੋਂ ਕਿ ਪੇਚ ਨੂੰ ਰੋਟੇਸ਼ਨ-ਰੋਟੇਸ਼ਨ ਬਣਾਇਆ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਪੇਚ ਰੇਖਿਕ ਗਤੀ ਕਰੇਗਾ)
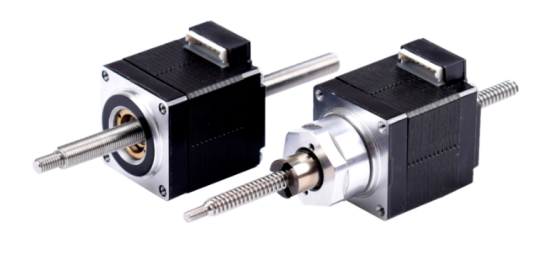
ਥਰੂ-ਐਕਸਿਸ ਕਿਸਮ
ਦੂਜਾ ਹੈ ਲੈਣਾਪੇਚਮੋਟਰ ਆਊਟ ਸ਼ਾਫਟ ਦੇ ਤੌਰ 'ਤੇ, ਮੋਟਰ ਵਿੱਚ ਇੱਕ ਬਾਹਰੀ ਡਰਾਈਵ ਨਟ ਅਤੇ ਪੇਚ ਦੀ ਸ਼ਮੂਲੀਅਤ ਰਾਹੀਂ ਰੇਖਿਕ ਗਤੀ ਨੂੰ ਮਹਿਸੂਸ ਕਰਨ ਲਈ, ਇਹ ਬਾਹਰੀ ਡਰਾਈਵ ਕਿਸਮ ਦਾ ਪੇਚ ਸਟੈਪਿੰਗ ਮੋਟਰ ਹੈ। ਨਤੀਜਾ ਇੱਕ ਬਹੁਤ ਹੀ ਸਰਲ ਡਿਜ਼ਾਈਨ ਹੈ ਜੋ ਬਹੁਤ ਸਾਰੇ ਐਪਲੀਕੇਸ਼ਨਾਂ ਵਿੱਚ ਸ਼ੁੱਧਤਾ ਰੇਖਿਕ ਗਤੀ ਨੂੰ ਸਿੱਧੇ ਤੌਰ 'ਤੇ ਇੱਕ ਪੇਚ ਸਟੈਪਰ ਮੋਟਰ ਨਾਲ ਬਿਨਾਂ ਕਿਸੇ ਬਾਹਰੀ ਮਕੈਨੀਕਲ ਲਿੰਕੇਜ ਦੀ ਸਥਾਪਨਾ ਦੇ ਯੋਗ ਬਣਾਉਂਦਾ ਹੈ। (ਨਟ ਮੋਟਰ ਦੇ ਬਾਹਰੀ ਹੈ ਅਤੇ ਡਰਾਈਵ ਵਿਧੀ ਨਾਲ ਜੁੜਿਆ ਹੋਇਆ ਹੈ। ਜਦੋਂ ਮੋਟਰ ਘੁੰਮਦੀ ਹੈ, ਤਾਂ ਪੇਚ ਦੇ ਨਾਲ ਗਿਰੀਦਾਰ ਰੇਖਿਕ ਗਤੀ ਨੂੰ ਰੇਖਿਕ ਰੂਪ ਵਿੱਚ ਚਲਦਾ ਹੈ।)
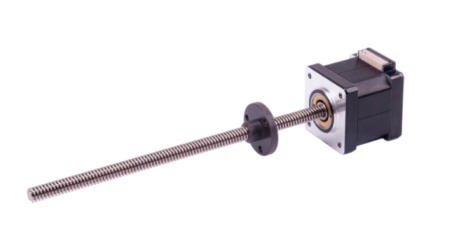
ਬਾਹਰੀ ਡਰਾਈਵ ਕਿਸਮ
ਥਰੂ-ਐਕਸਿਸ ਲੀਨੀਅਰ ਸਟੈਪਿੰਗ ਮੋਟਰ ਦੇ ਐਪਲੀਕੇਸ਼ਨ ਫਾਇਦੇ:
ਐਪਲੀਕੇਸ਼ਨ ਦ੍ਰਿਸ਼ਾਂ ਦੀ ਤੁਲਨਾ ਕਰਨਾ ਜਿੱਥੇ ਬਾਹਰੀ ਤੌਰ 'ਤੇ ਚਲਾਏ ਜਾਣ ਵਾਲੇ ਲੀਨੀਅਰ ਸਟੈਪਰ ਮੋਟਰਾਂ ਨੂੰ ਜੋੜ ਕੇ ਵਰਤਿਆ ਜਾਂਦਾ ਹੈਰੇਖਿਕ ਗਾਈਡਵੇਅ, ਥਰੂ-ਐਕਸਿਸ ਲੀਨੀਅਰ ਸਟੈਪਰ ਮੋਟਰਾਂ ਦੇ ਆਪਣੇ ਵਿਲੱਖਣ ਫਾਇਦੇ ਹਨ, ਜੋ ਮੁੱਖ ਤੌਰ 'ਤੇ ਹੇਠ ਲਿਖੇ 3 ਪਹਿਲੂਆਂ ਵਿੱਚ ਪ੍ਰਤੀਬਿੰਬਤ ਹੁੰਦੇ ਹਨ:
1.ਵੱਡੀ ਸਿਸਟਮ ਇੰਸਟਾਲੇਸ਼ਨ ਗਲਤੀ ਦੀ ਆਗਿਆ ਦਿੰਦਾ ਹੈ:
ਆਮ ਤੌਰ 'ਤੇ, ਜੇਕਰ ਬਾਹਰੀ ਤੌਰ 'ਤੇ ਚੱਲਣ ਵਾਲੀ ਲੀਨੀਅਰ ਸਟੈਪਰ ਮੋਟਰ ਦੀ ਵਰਤੋਂ ਕੀਤੀ ਜਾਂਦੀ ਹੈ, ਤਾਂ ਪੇਚ ਅਤੇ ਗਾਈਡਵੇਅ ਮਾਊਂਟਿੰਗ ਵਿਚਕਾਰ ਮਾੜੀ ਸਮਾਨਤਾ ਸਿਸਟਮ ਦੇ ਰੁਕਣ ਦਾ ਕਾਰਨ ਬਣ ਸਕਦੀ ਹੈ। ਹਾਲਾਂਕਿ, ਥਰੂ-ਐਕਸਿਸ ਲੀਨੀਅਰ ਸਟੈਪਰ ਮੋਟਰਾਂ ਦੇ ਨਾਲ, ਇਸ ਘਾਤਕ ਸਮੱਸਿਆ ਨੂੰ ਡਿਜ਼ਾਈਨ ਦੀਆਂ ਢਾਂਚਾਗਤ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਦੇ ਕਾਰਨ ਬਹੁਤ ਹੱਦ ਤੱਕ ਸੁਧਾਰਿਆ ਜਾ ਸਕਦਾ ਹੈ, ਜੋ ਕਿ ਵਧੇਰੇ ਸਿਸਟਮ ਗਲਤੀ ਦੀ ਆਗਿਆ ਦਿੰਦੀਆਂ ਹਨ।
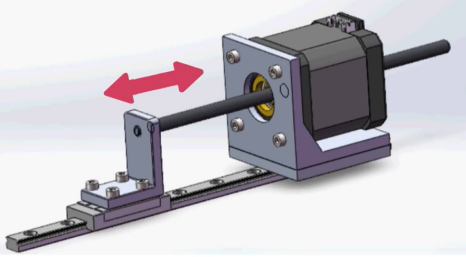
ਜਦੋਂ ਮੋਟਰ ਊਰਜਾਵਾਨ ਹੁੰਦੀ ਹੈ, ਤਾਂ ਗਿਰੀ ਰੋਟਰ ਦੇ ਨਾਲ ਘੁੰਮਦੀ ਹੈ ਅਤੇ ਪੇਚ ਇੱਕ ਬਾਹਰੀ ਲੋਡ ਨਾਲ ਜੁੜਿਆ ਹੁੰਦਾ ਹੈ ਅਤੇ ਗਾਈਡ ਦੇ ਨਾਲ ਇੱਕ ਸਿੱਧੀ ਲਾਈਨ ਵਿੱਚ ਚਲਦਾ ਹੈ।
2.ਪੇਚ ਦੀ ਨਾਜ਼ੁਕ ਗਤੀ ਦੁਆਰਾ ਸੀਮਿਤ ਨਹੀਂ:
ਜਦੋਂ ਬਾਹਰੀ ਤੌਰ 'ਤੇ ਚਲਾਏ ਜਾਣ ਵਾਲੇ ਲੀਨੀਅਰ ਸਟੈਪਰ ਮੋਟਰਾਂ ਨੂੰ ਹਾਈ-ਸਪੀਡ ਲੀਨੀਅਰ ਮੋਸ਼ਨ ਲਈ ਚੁਣਿਆ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਉਹ ਆਮ ਤੌਰ 'ਤੇ ਪੇਚ ਦੀ ਨਾਜ਼ੁਕ ਗਤੀ ਦੁਆਰਾ ਸੀਮਿਤ ਹੁੰਦੇ ਹਨ। ਹਾਲਾਂਕਿ, ਇੱਕ ਥਰੂ-ਐਕਸਿਸ ਲੀਨੀਅਰ ਸਟੈਪਰ ਮੋਟਰ ਦੇ ਨਾਲ, ਪੇਚ ਸਥਿਰ ਅਤੇ ਰੋਟੇਸ਼ਨ-ਰੋਟੇਸ਼ਨ ਹੁੰਦਾ ਹੈ, ਜਿਸ ਨਾਲ ਮੋਟਰ ਲੀਨੀਅਰ ਗਾਈਡਵੇਅ ਦੇ ਸਲਾਈਡਰ ਨੂੰ ਚਲਾ ਸਕਦੀ ਹੈ। ਕਿਉਂਕਿ ਪੇਚ ਸਥਿਰ ਹੁੰਦਾ ਹੈ, ਇਸ ਲਈ ਇਹ ਉੱਚ ਗਤੀ ਨੂੰ ਮਹਿਸੂਸ ਕਰਦੇ ਸਮੇਂ ਪੇਚ ਦੀ ਨਾਜ਼ੁਕ ਗਤੀ ਦੁਆਰਾ ਸੀਮਿਤ ਨਹੀਂ ਹੁੰਦਾ।
3.ਇਹ ਇੰਸਟਾਲੇਸ਼ਨ ਸਪੇਸ ਬਚਾਉਂਦਾ ਹੈ:
ਥਰੂ-ਐਕਸਿਸ ਲੀਨੀਅਰ ਸਟੈਪਿੰਗ ਮੋਟਰ ਢਾਂਚਾਗਤ ਡਿਜ਼ਾਈਨ ਦੇ ਕਾਰਨ ਪੇਚ ਦੀ ਲੰਬਾਈ ਤੋਂ ਇਲਾਵਾ ਵਾਧੂ ਜਗ੍ਹਾ ਨਹੀਂ ਲੈਂਦੀ ਜਿੱਥੇ ਗਿਰੀ ਮੋਟਰ ਵਿੱਚ ਬਣੀ ਹੁੰਦੀ ਹੈ। ਇੱਕੋ ਪੇਚ 'ਤੇ ਕਈ ਮੋਟਰਾਂ ਲਗਾਈਆਂ ਜਾ ਸਕਦੀਆਂ ਹਨ। ਮੋਟਰਾਂ ਇੱਕ ਦੂਜੇ ਵਿੱਚੋਂ "ਪਾਸ" ਨਹੀਂ ਹੋ ਸਕਦੀਆਂ, ਪਰ ਉਨ੍ਹਾਂ ਦੀਆਂ ਹਰਕਤਾਂ ਇੱਕ ਦੂਜੇ ਤੋਂ ਸੁਤੰਤਰ ਹੁੰਦੀਆਂ ਹਨ। ਇਸ ਲਈ, ਇਹ ਵਧੇਰੇ ਸਖ਼ਤ ਸਪੇਸ ਜ਼ਰੂਰਤਾਂ ਵਾਲੇ ਐਪਲੀਕੇਸ਼ਨਾਂ ਲਈ ਇੱਕ ਢੁਕਵਾਂ ਵਿਕਲਪ ਹੈ।
ਵਧੇਰੇ ਜਾਣਕਾਰੀ ਲਈ, ਕਿਰਪਾ ਕਰਕੇ ਸਾਡੇ ਨਾਲ ਇੱਥੇ ਸੰਪਰਕ ਕਰੋamanda@kgg-robot.comਜਾਂ+ਡਬਲਯੂਏ0086 15221578410.
ਪੋਸਟ ਸਮਾਂ: ਫਰਵਰੀ-11-2025




